Projects
IC Projects
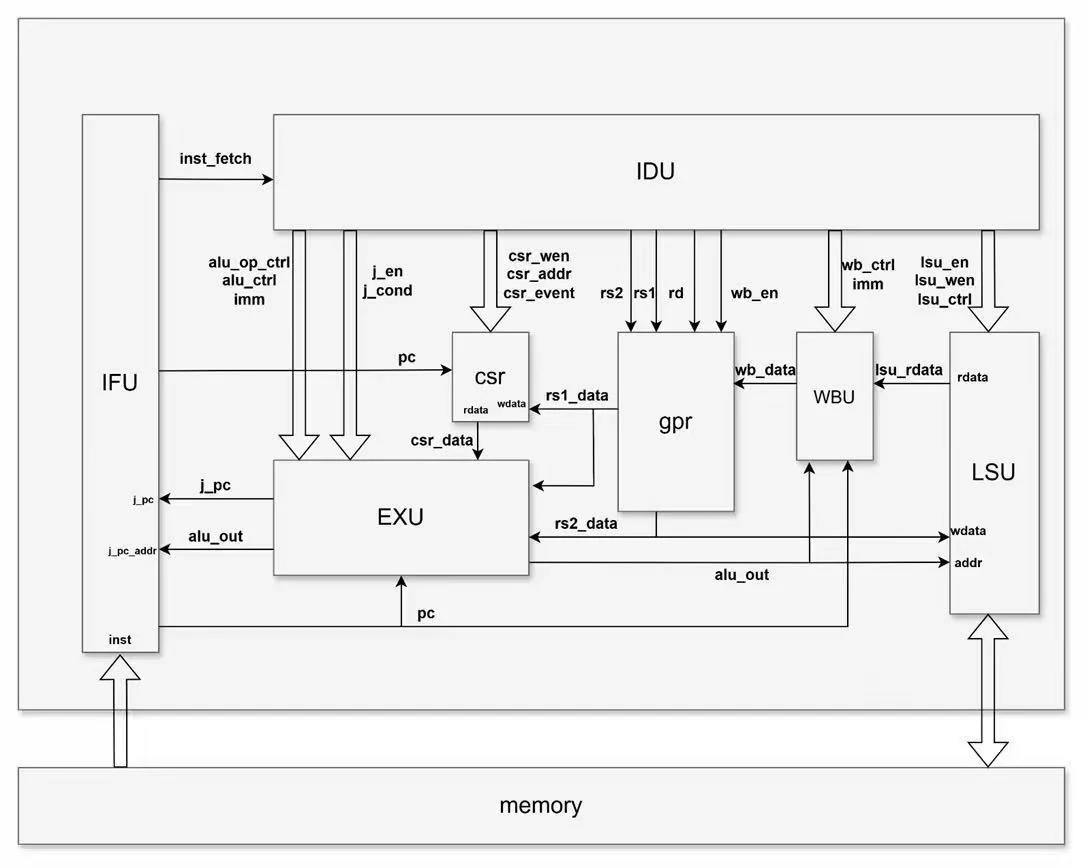
RTL RISC-V CPU Implementation & Verification
Designed and verified a multi-cycle RTL RISC-V CPU with latency-insensitive handshake-based microarchitecture, differential testing, and RTOS bring-up.
- Designed a modular multi-cycle RV32E CPU (IF/ID/EX/LSU/WB) with valid-ready handshake for stage and memory interaction
- Implemented machine-mode privilege architecture including CSR subsystem and precise exception/trap handling
- Built a C reference model (RV32E + M) and developed differential testing (DUT vs. reference) for instruction-level verification
- Integrated a custom SimpleBus-based memory interface with request/response protocol supporting variable-latency access
- Designed and integrated an AXI4-Lite read interface for instruction-fetch memory access, enabling bus-based external memory communication
- Developed a Verilator-based simulation framework with waveform tracing, instruction/memory trace, and debug tooling
- Successfully booted RT-Thread RTOS on the RTL CPU, validating system-level execution and exception handling
Tools: Verilog, C/C++, Python, Verilator, GTKWave, RISC-V ISA, Difftest
Class-AB Audio Amplifier Design in GF 0.18-μm CMOS
Designed a class-AB audio amplifier with full-custom layout and post-layout verification.
- Designed amplifier, bias, and start-up circuits
- Applied translinear-loop class-AB control and Ahuja compensation
- Completed layout with DRC/LVS clean and PEX
- Verified performance across PVT corners
- Achieved ~12-dB gain, ~300-kHz UGBW, >60° phase margin
Tools: Cadence Virtuoso, Spectre, Layout, DRC, LVS, PEX
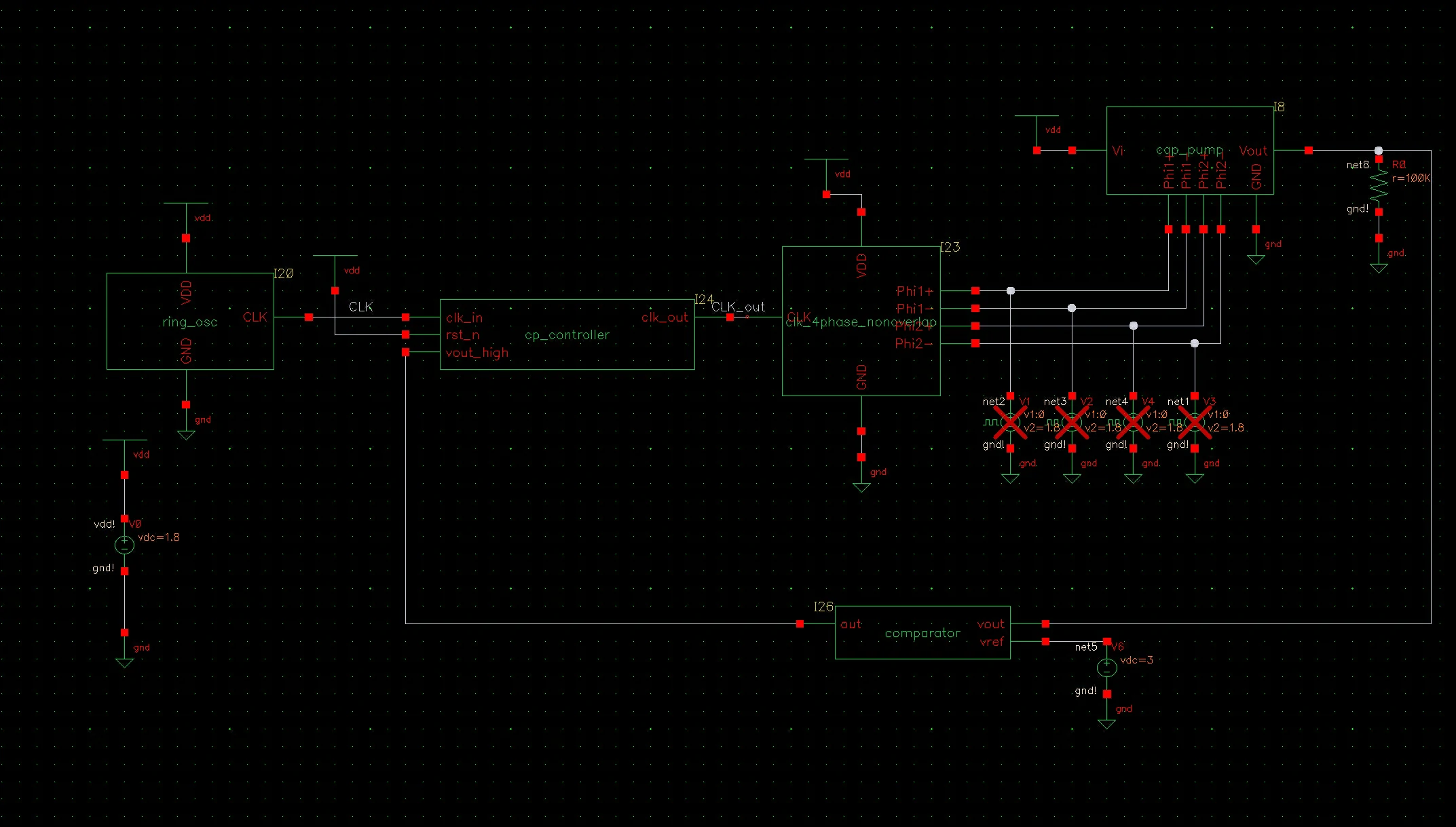
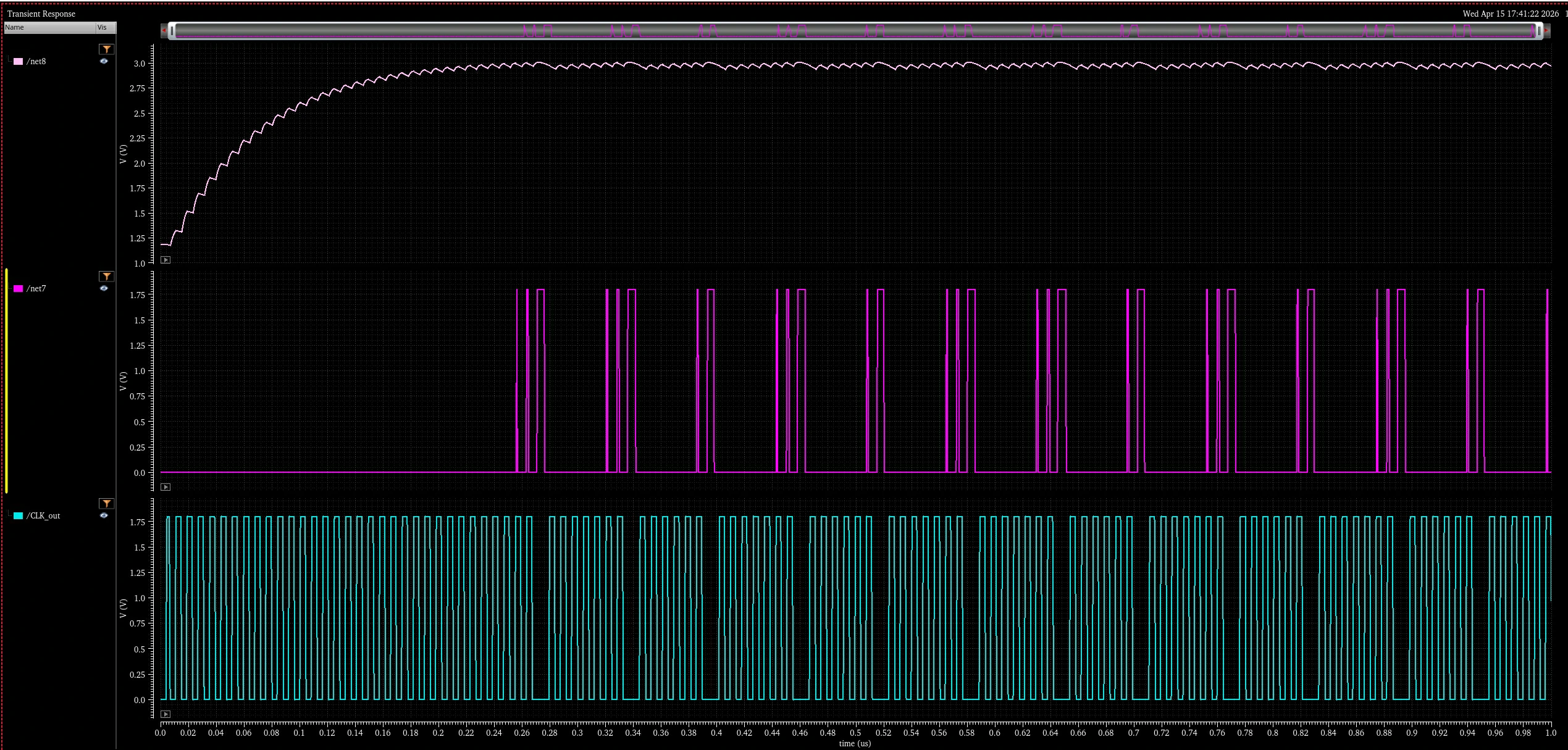
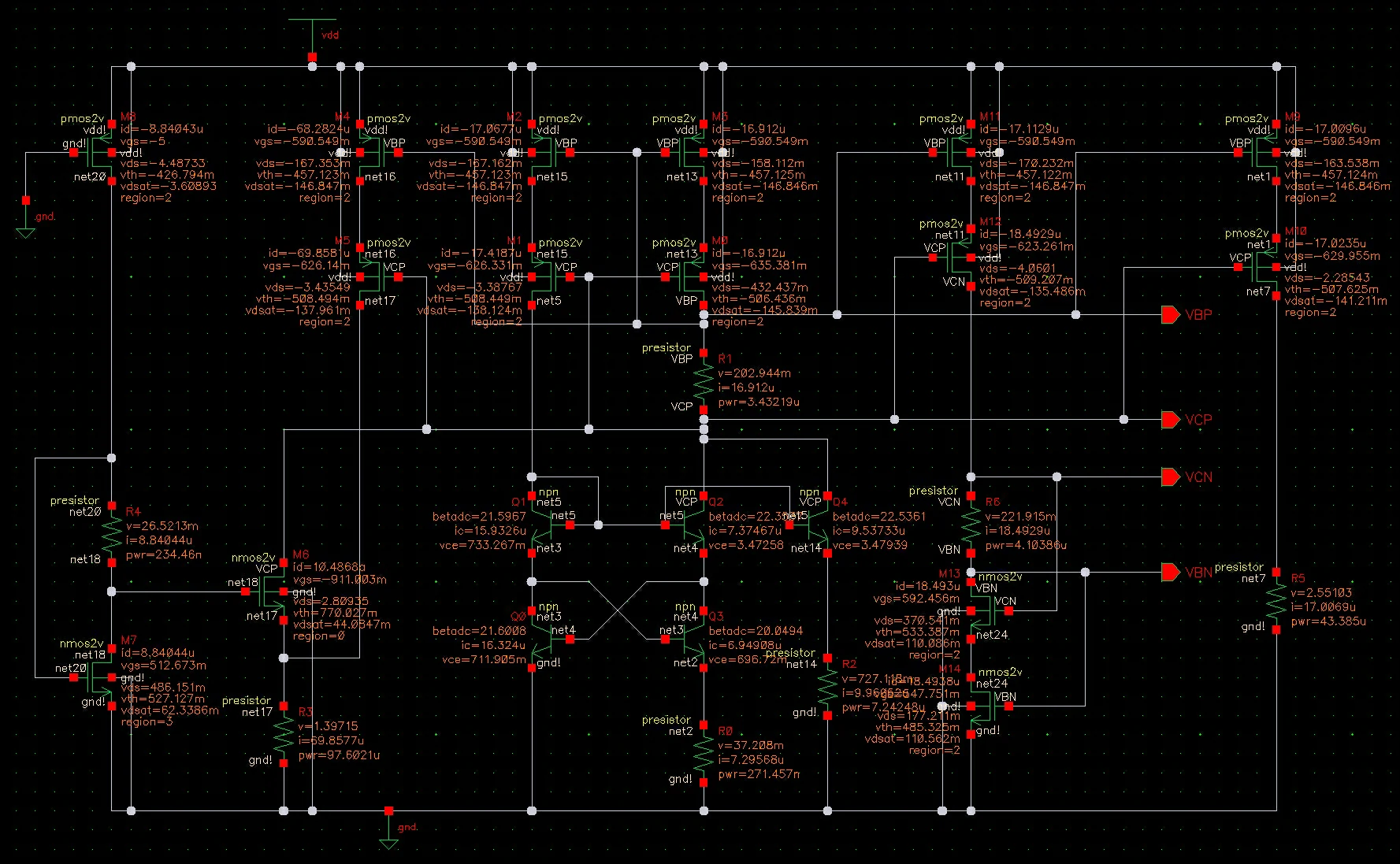
Digitally Controlled Cross-Coupled Charge Pump in 0.18-µm CMOS
Designed a 2-stage cross-coupled charge pump with 4-phase non-overlapping clock generation and closed-loop digital regulation in Cadence Virtuoso.
- Designed a 2-stage cross-coupled charge pump for on-chip voltage boosting
- Implemented 4-phase non-overlapping clock generation to improve charge transfer stability
- Optimized device sizing and pumping capacitance to balance boosting capability, ripple, and startup behavior under leakage effects
- Built a bang-bang closed-loop digital control scheme using comparator feedback for output regulation
- Achieved regulated output of 2.94-3.01 V from a 1.8 V supply with about 70 mV peak-to-peak ripple under ~100 kΩ load in schematic-level simulations
Tools: Cadence Virtuoso
Bandgap-Based Reference Voltage Design in TSMC 0.18-μm CMOS
Designed a temperature-compensated reference circuit based on BJT ΔVbe generation and PTAT/CTAT compensation.
- Implemented ΔVbe generation using BJT area ratio (N = 4)
- Designed bias network and current mirrors for stable operation
- Optimized resistor ratios to balance PTAT and CTAT components
- Achieved ~25 ppm/°C over -40°C to 100°C
- Output reference voltage ~2.54 V
Tools: Cadence Virtuoso, Spectre
Competitions
Multi-Vehicle Formation System (17th National College Smart Car Competition, WCH Track)
Triple-vehicle coordinated racing system with path tracking, road recognition, and overtaking.
- Designed a three-vehicle cooperative control system within a 5-member team, enabling coordinated tracking and overtaking via wireless communication
- Developed custom electromagnetic sensing module for path tracking using AC-driven wire, enabling robust line detection
- Implemented multi-loop PID control for motor speed, inter-vehicle spacing, and steering servo angle
- Built full hardware system including sensor module, motor driver, and custom PCB (CH32V307 + STC16)
- Designed wireless networking between vehicles for real-time state exchange and cooperative decision-making
- Performed embedded software development and parameter tuning for control stability and high-speed operation
- Integrated 3D-printed mechanical structures for chassis and system assembly
- Achieved 2nd place in East China region and National Second Prize in a high-speed autonomous racing competition
Award: National Second Prize
Tools: CH32V307, STC16, Embedded C, Sensors, Motor Control
Dual-Vehicle Following System - TI Cup National Electronic Design Contest
Dual-vehicle system with sensor tracking and autonomous distance control.
- Designed a dual-vehicle cooperative system with Bluetooth-based communication for coordinated following control
- Implemented grayscale sensor-based path tracking for reliable line following
- Integrated ultrasonic sensing for real-time inter-vehicle distance measurement
- Developed multi-loop PID control for vehicle speed and following distance regulation
- Built MSP430-based embedded system including control logic and peripheral circuit design
- Optimized following strategy for stability and responsiveness in dynamic conditions
- Awarded First Prize in Jiangsu Province (TI Cup Electronic Design Contest)
Award: Provincial First Prize
Tools: MSP430F5529, Embedded C, Sensors, Motor Control